ادامه مبحث دیود ها، دیود زنر، بررسی چشم انداز کار و بررسی مراحل ساخت یک ربات آتش نشان...
به نام خدا
با عرض سلام مجدد خدمت همه ي دوستاي عزيز
اجازه بديد بحث جلسه ي پيش رو بدون هيچ مقدمه اي دنبال کنيم، يعني ديود:
همانطور که مي دانيد ديودها جريان الکتريکي را در يک جهت از خود عبور ميدهند و در جهت مخالف در مقابل عبور جريان از خود مقاومت نشان ميدهند(اين مقاومت آنقدر زياد است که تقريباً عايق مي شوند و جرياني عبور نمي دهند).جالبه که بدانيد به همين دليل در سالهاي اوليه ساخت اين وسيله الکترونيکي، به آن دريچه(Valve )هم مي گفتند.
هنگامي که پايه ي مثبت ديود به قطب + منبع تغذيه(باطري يا هر مولد ديگر) و پايه ي منفي آن به قطب – متصل شود، ديود جريان را عبور داده و اگر برعکس وصل شود تقريباً جريان قطع مي شود.
براي فعال شدن ديود بايد بين 2 سر آن حداقل 0.6 الي 0.7 ولت اختلاف پتانسيل برقرار شود، يعني اگر کمتر از اين مقدار ولتاژ بر روي آن قرار گيرد، ديود هيچ جرياني را از خود عبور نمي دهد. اين ولتاژ را ولتاژ آستانه (Forward Voltage Drop) مي گويند.
هنگامي که شما ولتاژ معکوس به ديود متصل مي کنيد(- به + ، + به -)، ديود جرياني بسيار کوچک و در حدA ? يا حتي کمتر از آن را از خود عبور مي دهد، ولي اين مقدار آنقدر کم است که هيچ تاثيري بر مدارهاي ما نخواهد داشت.
|
نکته ي مهم: ديودها يک آستانه(Limit) براي حداکثر ولتاژ معکوس دارند که اگر ولتاژ معکوس از آن بالاتر رود، ديود بر اثر پديده ي فروشکست ميسوزد و جريان را در هر دو جهت عبور ميدهد. اين ولتاژ را آستانه شکست (Break Down) مي گويند.
|
پايه ي منفي ديودها را با يک نوار سفيد يا خاکستري رنگ در کنار آن مشخص مي کنند.(به شکل دقت کنيد)

ديود را در مدارهاي شماتيک به شکل نشان مي دهند که ترتيب + و - پايه هاي آن نيز روي شکل مشخص شده.
نشان مي دهند که ترتيب + و - پايه هاي آن نيز روي شکل مشخص شده.
دسته ي ديگري از ديود ها به نام ديودهاي زنر(Zener) وجود دارند که از آنها براي تثبيت ولتاژ استفاده مي کنيم. به عنوان مثال با استفاده از اين ديودها مي توان ولتاژ را روي 5V ثابت نگه داشت. ولي ما براي تثبيت ولتاژ از اين قطعه استفاده نخواهيم کرد، زيرا محدوديت هايي دارد که بهتر است به جاي آن از قطعات ديگري مثل رگولاتور استفاده شود. در مورد رگولاتور در جلسات آينده توضيح کاملتري داده خواهد شد.
بحث ديود در اينجا به پايان رسيد، به ادامه ي بحث توجه کنيد:
خوب ، وقت اين رسيده که ببينيم اين مطالبي که تا حالا کم و بيش ياد گرفتيم چه ارتباطي با کار ما داره، آيا اين مطالبي که ياد گرفتيم همشون ضروري و مهم بودند ؟ از اين به بعد چه چيزايي ياد مي گيريم؟ و در نهايت قراره بعد از اموختن اين مطالب به کجا برسيم؟
ما ميخواهيم در ادامه يک ديد کلي از يک ربات داشته باشيم تا متوجه بشويم که مطالبي که الآن ارايه مي شوند، هر کدام در چه بخش هايي کاربرد دارند.
شايد اولين سوالي که بايد جواب داده بشه اين هستش که ما مي خواهيم در نهايت چه رباتي بسازيم؟
: ما قصد داريم به لطف خدا يک ربات آتش نشان را در پايان اين دوره ها طراحي کرده و بسازيم. پس بد نيست ساختار يک ربات آتش نشان ساده رو با هم بررسي کنيم.
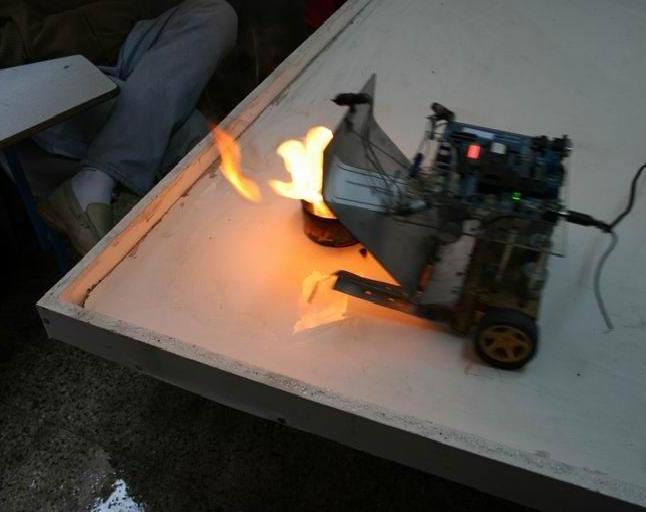
در حالت کلي يک ربات شامل 3 بخش زير مي باشد:
1- ورودي ها: شامل همه ي سنسورهاي مختلف ربات که اطلاعات محيط رو اعم از ميزان نور، ميزان گازهاي مختلف، درجه حرارت محيط و.... دريافت و در در اختيار بخش پردازش گر ربات قرار مي دهند
2- پردازش گر: اطلاعات ورودي ربات را دريافت و توسط مدارهاي کنترلي(اعم از ميکرو کنترولرها و مدارهاي الکترونيکي ديگر) آنرا پردازش و تصميم گيري مي کند و تصميمات رو در اختيار بخش هاي اجرايي ربات قرار مي دهد.
3- خروجي ها(بخش هاي اجرايي): شامل موتورها، پمپ آب، LEDهاي هشدار دهنده، آژير خطر و...
ابتدا ربات به وسيله ي سنسورهاي نوري(نوعي مقاومت نوري) و بخش پردازشگر ابتدا مکان آتش را بر روي زمين مشابقه پيدا مي کند.
| الگوريتم پيدا کردن آتش:(الگوريتم در اينجا به معناي راهکار حل مسآله مي باشد) |
همان طور که ميدونيد يکي از مهمترين مشخصات آتش تابش نور و گرماي زياد مي باشد. مقاومت هاي نوري هم هر زماني که نور بيشتري از محيط دريافت کنند مقاومت آنها کمتر مي شود(در اينجا از مقاومت نوري به عنوان حسگر نور استفاده کرديم). ربات براي پيدا کردن آتش در ابتدا به صورت ثابت به دور خود مي چرخد. يک مقاومت نوري نيز در جلوي ربات قرار دارد . هنگاميکه جلوي ربات در حين چرخش در مقابل آتش قرار بگيرد، نوري که به مقاومت نوري ميرسد افزايش يافته و مقاومت آن کاهش مي يابد. در نتيجه ربات توسط بخش پردازشگر وجود آتش را تشخيص مي دهد. بخش پردازشگر دستور توقفِ چرخش و حرکت به سوي آتش را صادر مي کند. اين دستور توسط مدارهاي واسط(در اينجا منظور مدارهايست که براي تقويت و کنترل جريان طراحي مي شوند) به موتورها منتقل و اجرا مي شود و ربات به سوي آتش حرکت مي کند.
اين ساختار يکي از ساده ترين ساختارها براي ساخت ربات آتش نشان مي باشد که الآن به صورت بسيار مختصر ارايه شد.
ما بعد از پايان اين بخش وارد بخش ديجيتال شده و با طراحي هاي ديجيتال و بحث هايي از مدارهاي منطقي آشنا مي شويد که قطعاً جذابيت هاي بسيار زيادي براي دوستاي عزيز خواهد داشت. در حقيقت بخش فعلي شايد کسل کننده ترين بخش کار ما مي باشد، چون مطالب ارايه شده بيشتر قالب کلاسيک و سنتي دارد و هنوز به معني واقعي وارد بخش هاي پژوهشي و عملي کار نشديم!
منتظر سوالات و نظرات دوستاي خوبم هستم...
جلسه ي بعدي بعد از ظهر چهارشنبه روي سايت قرار داده خواهد شد.
فعلاً خدا نگه دار...
دوست شما، فرازامیرغیاثوند
ربات در حال حرکت به سوي آتش مي باشد،پس بايد در يک فاصله ي مناسب از آتش که در آن فاصله به ربات اسيب نرسد بايستد و پمپ آب روشن کرده و آتش را خاموش کند. براي اين کار يک مقاومت نوري ديگر را جوري بر روي ربات قرار مي دهيم تا فقط هنگاميکه ربات در بالا سر آتش قرار ميگيرد اين سنسور آتش را ببيند. (سنسور به صورت عمود بر زمين مسابقه و در ارتفاع حدود 20،10سانتيمتري سطح زمين قرار مي گيرد). پس هنگاميکه اين مقاومت نوري در مقابل آتش قرار گرفت، بخش پردازشگر به موتورها دستور توقف و به پمپ آب دستور پاشيدن آب را مي دهد. به اين ترتيب آتش خاموش مي شود.