انجام آزمايش شمارهي 2، مربوط به مبحث خازنها...
به نام خدا
با عرض سلام مجدد خدمت همه ي دوستاي خوبم
در اين جلسه، دومين آزمايش رو با کمک دوستان عزيز انجام خواهيم داد.
اين آزمايش مربوط به مبحث خازن ها مي شود و براي نشان دادن شارژ(پر شدن) و دِشارژ (خالي شدن) شدن يک خازن طراحي شده است.
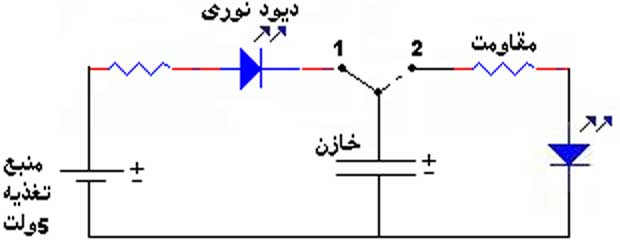
گام اول: مدار زير را با توجه به جدول ببنديد.
| C=2200µF |
C=1000µF |
C=470µF |
|
|
=T3 |
=T2 |
=T1 |
R=220? |
|
=T6 |
=T5 |
=T4 |
R=1K? |
زمان شارژ و دِشارژ با توجه به زمان روشن بودن LED ها، به ازاي خازن هاي مختلف اندازه گيري نماييد.
براي شارژ كردن خازن بايد اتصال شماره ي 1 برقرار شود، زمان شارژ را ميتوانيد با توجه به مدت روشن بودن LED سمت چپ اندازه گيري نماييد
براي دِشارژ كردن خازن، بايد اتصال شماره ي 2(طبق شكل) برقرار شود. پس زمان دِشارژ را نيز ميتوانيد با توجه به مدت زمان روشن بودن LED سمت راست،اندازه گيري نماييد.
همانطور كه مشاهده مي كنيد، با افزايش مقدار مقاومت در هر قسمت يا افزايش ظرفيت خازن ها، زمان شارژ و دِشارژ خازن افزايش ميابد.
اين جلسه مطلب تئوري نسبتاً كمي دارد و دوستان بايد زمان خود را صرف بستن مدار بالا و پركردن جدول كنند.
لازم ميدونم اين مطلب رو دوباره خدمت دوستان عزيز يادآوري كنم كه در رباتيك، مهمترين اصل، انجام كار به صورت تيمي و گروهي است و به دوستان پيشنهاد ميكنم حتماً آزمايش ها رو به صورت تيمي انجام بدهند.
اگر دوستان در روند كار با مشكل يا مسئلهاي روبرو شدند حتماً با ما در ميون بگذارند.
تا جلسهي آينده، خدا نگه دار
دوست شما، فراز