آشنايي با Codevision، لبهي Port، لبهي Chip، آشنايي با Pullup و Output value و ...
این جلسه همانطور که قول داده بودیم، قراره کمی در مورد Codevision توضیحاتی بدیم.
در ابتدا دوستان عزیز برای اینکه بتونن مطلب رو با ما دنبال کنند، لازمه که این نرم افزار تهیه کرده و روی کامپیوتر شخصی خود نصب کنند. در زیر نسخه ی2.03.4 Crack شدهی این نرم افزار را، برای دانلود دوستان قرار دادیم.(حجم 8.15مگابایت)
|  |
به نام خدا
با عرض سلام خدمت همه ی دوستان عزیزم.
و با عرض پوزش فراوان به خاطر تاخیر چند روزه در ارائه ی جلسه ی بیست و ششم.
این جلسه همانطور که قول داده بودیم، قراره کمی در مورد Codevision توضیحاتی بدیم.
در ابتدا دوستان عزیز برای اینکه بتونن مطلب رو با ما دنبال کنند، لازمه که این نرم افزار تهیه کرده و روی کامپیوتر شخصی خود نصب کنند. در زیر نسخه ی2.03.4 Crack شدهی این نرم افزار را، برای دانلود دوستان قرار دادیم.(حجم 8.15مگابایت)
براي دانلود نرم افزار اينجا كليك كنيد
پس انجام مراحل نصب برنامه، برنامه را باز کنید.
| چگونه يك پروژهي جديد تعريف كنيم؟ |
برای نوشتن یک پروژه ی جدید، باید ایتدا از منوی File، گزینه ی New را انتخاب کنید. یک پنجره ی کوچک در وسط صفحه باز می شود که در آن باید گزینه ی Project را انتخاب کرده و تایید کنید. بلافاصله پنجره ی دیگری باز می شود که از شما سوال می کند آیا تمایل دارید برای انجام پروژه ی خود از CodeWizard استفاده کنید؟
همانطور که گفته شد، CodeWizard یکی از نرم افزارهای جانبی CodeVision است که به وسیله ی یک واسط گرافیکی، در نوشتن برنامه ی اصلی و انجام تنظیمات اولیه پورت ها و ....، کمک بسیار زیادی به ما می کند.
پس گزینه ی Yes را انتخاب می کنیم و CodeWizard باز می شود.
| چگونه از CodeWizard استفاده کنیم: |
شکل زیر، نمای کلی از CodeWizard است:

همانطور که میبینید، لبه های متعددی برای انجام تنظیمات مختلف میکروکنترلر در آن وجود دارد.
اولین لبه ای که ما با آن کار داریم لبه ی Chip است. در این قسمت ما باید نوع میکروکنترلر خودمان را انتخاب کنیم. همانطور که در شکل بالا می بینید، میکرو کنترلر ATmega16L را انتخاب کرده ایم.
قسمت Clock مربوط به تنظیم فرکانس کاری آی سی است که ما فعلاً وارد اين مبحث نميشويم و آنرا با همان مقدار پیش فرض می پذیریم. با قسمت های دیگر این لبه هم ما کاری نداریم و آن ها را به همان صورت پیش فرض می پذیریم.
این لبه مربوط به تنظیمات ورودی خروجی پایه هاست.
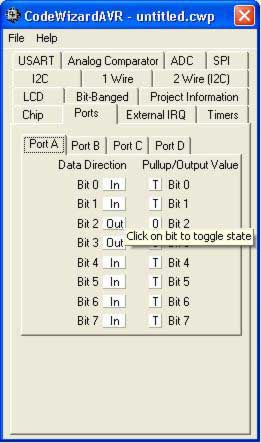
همانطور که می بینید هر پایه از هر پورت را در این قسمت می توان به راحتی به صورت In (ورودی) و یا Out(خروجی) تنظیم کرد. فقط کافیست لبه ی مربوط به پورت مورد نظر را انتخاب کنید، حالا برای تغییر وضعیت هر پایه باید روی آن کلیک کنید.
| Output value یا مقدار اولیه: |
وقتی پایه ای را به صورت خروجی تنظیم می کنیم، می توان با تنظیم رجیستری PORTx تعیین کرد که سطح ولتاژ خروجی این پایه به صورت پیش فرض 0 باشد یا 1. یعنی در زمانیکه هنوز برنامهي ما برای پایه ها تعیین وضعیت نکرده است، می توان به این طریق سطح ولتاژ اولیه ی پایه را تعیین نمود.
CodeWizard در این جا هم کار ما را راحت تر کرده است، در ستون مقابل یعنی ستون "Pullup/Output value" برای پایه هایی که به صورت خروجی تعریف شده اند، می توان با یک کلیک وضعیت خروجی پایه را مشخص کرد. مثلاً الآن پایه ی شماره ی 2 از پورت A به صورت خروجی تعریف شده و در ستون مقابل نیز مقدار پیش فرض خروجی 0 تعیین شده است.
این قابلیت سخت افزاریست و در خانواده ی AVR نیز وجود دارد. Pullup کردن به این معناست که پایه ای را با یک مقاومت بالا(مثلاً 10 کیلو اهم) به + وصل کنیم. اگر هم پایه را با این مقاومت به GND وصل کنیم، می گوییم پایه را Pulldown کرده ایم. مقاومت بزرگ باعث می شود که جریان عبوری به حداقل کاهش یابد، ولی به وسیله ی ولتاژی که بر روی پایه قرار می گیرد، میتوان ورودی مورد نظر را در هنگامیکه هنوز ورودی از خارج دریافت نکرده به صورت پیش فرض 0 یا 1 کرد.
وقتی پایه ای را به صورت ورودی تعریف می کنیم، با تنظیم رجیستری PORTx می توان تعیین کرد که پایه ی ورودی به صورت پیش فرض Pullup باشد یا نباشد. دقت کنید که در اینجا نمی توان تنظیم کرد که مقدار ورودی پیش فرض 0 باشد، چون خانواده ی AVR قابلیت Pulldown ندارند وفقط می توان آنرا به صورت Pullup تنظیم نمود، و در نتیجه پایه ای که Pullup شده است در هنگامیکه هنوز از خارج مقداری را دریافت نکرده است، به صورت پیش فرض 1 منطقی شود.
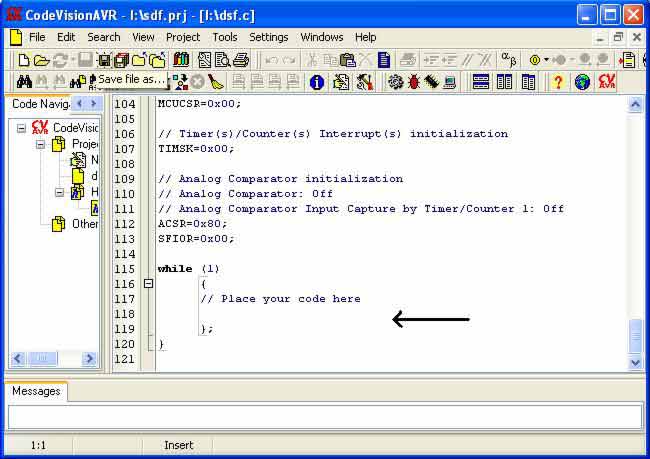
حالا بعد از انجام تنظیمات اولیه پورت ها و خود آی سی ، باید از Codewizard بخواهیم تا یک برنامه ی نیمه آماده با توجه به تنظیماتی که تنجان داده ایم در اختیار ما بذاره.
برای این کار از منوی File گزینه ی "Generate, Save and Exit" را انتخاب کنید. حالا باید جایی که می خواهید برنامه ی شما Save شود را مشخص کنید. Codevision در اینجا 3 فایل برای برنامه ی شما می سازد که باید آن ها را نام گداری کنید. بهتر است نام این 3 فایل و محل ذخیره سازی آن ها یکی باشد.
بعد از ساخته شدن این 3 فایل توسط Codevision برنامه آماده است، حالا شما باید دستورات خود را در محل تعیین شده بنویسید.
بعد از نوشتن برنامه باید آنرا کامپایل کرده و و سپس فایلHex آنرا بسازید و بعد از آن، فایل Hex را در میکرو کنترلر Load کنید. حالا میکروکنترلر شما پروگرام شده و آماده ی استفاده است. در جلسه ی آینده با روند اجرای این مراحل در Codevision آشنا خوهید شد.
جلسه ی آینده نیز شنبه ، 2/9بر روی سایت قرار داده خواهد شد.
منتظر نظرات و سوالات دوستان خوبم هستم.
موفق و پيروز باشيد، خدا نگه دار
دوست شما، فراز