سيستمهاي حركتي چند جهته با 3 چرخ، كاربرد قطب نماي الكتريكي در تصحيح حركت ربات و ...
به نام خدا
با عرض سلام خدمت دوستان عزيز
در اين جلسه نيز، بحث را در مورد سيستمهاي حركتي چهار جهته ادامه خواهيم داد و شما را با نوع ديگر اين سيستم كه در آن بهجاي 4 چرخ، فقط 3 چرخ وجود دارد، آشنا خواهيم كرد، همچنين به نكاتي اشاره خواهيم كرد كه براي استفاده از اين سيستم ميبايست حتماً به آن توجه كرد.
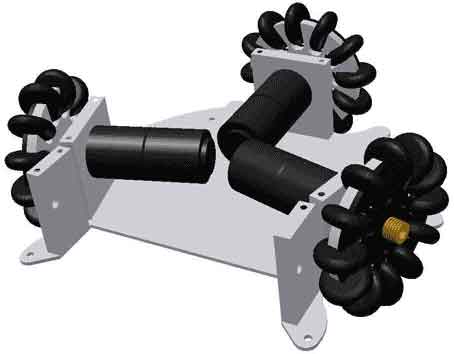
شكل زير تصوير يك ربات فوتباليست است كه در آن از سيستم حركتي 4-جهته استفاده شده و به دلايلي كه در ادامه مطرح خواهد شد، به جاي 4 چرخ، از 3 چرخ استفاده شده است.

استفاده از سيستم 3-چرخه، 2 مزيت مهم نسبت به سيستم 4-چرخه دارد:
|
مزيت نخست: سيستم 3-چرخه اين است كه جاي كمتري را در ربات اشغال ميكند. اين موضوع در رباتهاي فوتباليست اهميت زيادي پيدا ميكند، زيرا در اين رباتها همواره مشكل كمبود فضا وجود دارد و طراحان اين رباتها در تلاشند تا حد ممكن از سيستمها و قطعاتي استفاده كنند كه جاي كمتري اشغال ميكنند.
مزيت دوم: در سيستم 4-چرخه، يكي از مهمترين مشكلاتي كه وجود دارد اين است كه بهسختي ميتوان ارتفاع 4 چرخ را با يكديگر تراز كرد، يعني در اين سيستم ممكن است بهدليل ناهمواري زمين مسابقه، يكي از چرخهاي ربات با زمين اصطكاك نداشته باشد، مثلاً ممكن است يك سنگريزه زير يكي از چرخها گير كند و يكي از چرخها از روي زمين بلند شود. اين مشكل اصولاً براي همهي سيستمهاي چهار-چرخه وجود دارد، حتي براي خودروهاي سواري! اما چاره چيست؟
|
براي حل اين مشكل در خودرو ها از سيستم تعليق استفاده ميشود، يعني بهوسيلهي فنر و كمك فنر و ...، چرخها اين قابليت را پيدا ميكنند كه كمي نسبت به شاسي ماشين بالا و پايين بروند و به اين واسطه ميتوان اطمينان حاصل نمود كه هر چهار چرخ خودرو بهطور كامل با زمين اصطكاك دارند.
هرچند طراحي يك سيستم تعليق براي چرخهاي ربات كمي دشوار است، ولي تنها راهي است كه استفاده از سيستمهاي 4-چرخه را براي ما ممكن ميسازد.
اما استفاده از سيستم 3-چرخه كمي پيچيدهتر از سيستم چهار-چرخه است، زيرا در سيستم 4-چرخه به-سادگي مشخص بود براي حركت به هر سمت بايد كدام موتورها حركت كنند، اما در سيستم 3-چرخه كار كمي پيچيدهتر است، زيرا در همهي حركتها هر 3 موتور درگير هستند، اما سرعت و جهت آنها با يكديگر متفاوت است.
تنظيم سرعت موتورها را ميتوان با استفاده از PWMها انجام داد. يعني براي هدايت هر موتور از يك PWM ميكروكنترلر استفاده ميكنيم. ميدانيم كه براي حركت به جلو، عقب، چپ و ... بايد سرعت و جهت هر 3 موتور را تنظيم نمود. براي پيدا كردن سرعتهاي مناسب براي حركت ربات در هر جهت را ميتوان از بحثهايي كه در مورد بردارها در دروس دبيرستاني خواندهايد استفاده كرد، اما روش بسيار سادهتر و بعضاً كارآمدتر، استفاده از روش سعي و خطا است. مثلاً اگر ميخواهيم ربات به سمت چپ حركت كند، بايد با كم و زياد كردن عدد PWMها مشخص كنيم هر موتور با چه سرعتي و در چه جهتي حركت كند.
در جلسهي چهلم در مورد رباتهاي مينياب خودكار و الگوريتمهاي جستجوي زمين مسابقه توضيح داده شد. يك نكتهي بسيار مهم در ساخت رباتهايي كه از الگوريتم جستجوي منظم استفاده ميكنند وجود دارد كه بايد حتماً به آن توجه كرد. همانطور كه گفته شد ربات در اين الگوريتم ميبايست بهصورتي كه در شكل نشان داده شده است، كل زمين مسابقه را جستجو كند.
اما مشكل اين است كه ربات در حالت عادي بدون سيستمهاي تصحيح حركت نميتواند اين مسير را طي كند، زيرا طول زمين 5 متر است، و در اين مسافت طولاني نميتوان مطمئن بود كه ربات مسير مستقيم را طي كند. مثلاً طبق شكل بالا ربات حركت خود را در زمين مسابقه از خانهي (1و1) شروع ميكند و انتظار ميرود در انتهاي زمين به نقطهي (10و1) برسد، اما به دلايل گوناگون (مثلاً ناهمواريهاي سطح زمين يا عدم هماهنگي موتورها) بهجاي خانهي (10و1) به خانهي (10و2) ميرسد و در نتيجه بخشي از زمين مسابقه را نميتواند پوشش دهد.
براي حل اين مشكل چند راه وجود دارد (كه البته هيچ كدام هم زياد ساده نيستند)، متداولترين راه براي حل اين مشكل استفاده از قطبنماي الكتريكي است. بهوسيلهي قطبنماي الكتريكي، ربات ميتواند با دقت بسيار بالايي زاويهي خود را نسبت به قطب شمال و جنوب بهدست آورد، و بهكمك آن ميتواند هرگونه انحرافي را از مسير خود تشخيص دهد. يعني مثلاً اگر ربات 2 درجه به سمت راست منحرف شده باشد (2 درجه به سمت راست چرخيده باشد)، با استفاده از قطبنماي الكتريكي ميتوان اين انحراف را متوجه شد و سپس با فرمان مناسب به موتورها، مسير حركت ربات را اصلاح كرد. استفاده از قطبنماي الكتريكي نيازمند آموزش مبحث ارتباط سريال در ميكروكنترلر است، در جلسههاي آينده به اين موضوع مفصلاً خواهيم پرداخت.
نكتهي بالا فقط مربوط رباتهاي مينياب با سيستم حركتي 4-جهته نيست، بلكه در سيستم حركت ديفرانسيلي(سيستم حركت تانك) هم بايد به اين موضوع دقت كرد، مگر اينكه نخواهيم از الگوريتم جستجوي منظم استفاده كنيم و ربات الزامي به حركت دقيق نداشته باشد. علاوه بر آن در رباتهاي فوتباليست دانشاموزي هم بايد به موضوع انحراف ربات دقت كرد، در غير اين صورت ربات ممكن است بهجاي دروازهي حريف، به دروازهي خودش گل بزند.
جلسهي آينده شما را با ليگ رباتهاي فوتباليست دانشاموزي و ساختار كلي رباتهاي آن آشنا خواهيم كرد.
منتظر سوالات و نظرات دوستان عزيز هستم
جلسهي آينده سه شنبهي هفتهي آينده بر روي سايت قرار خواهد گرفت.
موفق و پيروز باشيد
دوست شما، فراز اميرغياثوند
واين نيز تصوير يك نمونهي ديگر از رباتهاي 3-چرخه با استفاده از اُمني ويل است: