معرفی سنسور فاصله سنج نوری شارپ
معرفی
در طول سال ها Sharp خانواده ای از سنسورهای مادون قرمز را معرفی کرده است. این سنسورها از بسته بندی کوچک، مصرف خیلی کم و خروجی های متنوع بهره مند هستند. این متن مروری است از انواع مختلف، اطلاعاتی درمورد مواجه با آنها و راهنمایی هایی در مورد این سنسور ها.
اگر به دنبال یک مقایسه ی ساده ی سنسور های شارپ باشید می توانید از بخش های زیر تا بخش "انتخاب سنسور" صرف نظر کنید.
تئوری عملیات
با معرفی سری سنسورهای شارپ GP2DXX، رویکرد تازه ای معرفی شده که نه تنها محدوده ی شناسایی اشیاء را نسبت به روش قبلی افزایش می دهد، بلکه در مورد سنسور های GP2D12، GP2D120 و GP2DY0A اطلاعات محدوده ی شناسایی را نیز در اختیار ما می گذارد. این
فاصله سنج ها آزادی بیشتری را نسبت به وضعیت نور محیطی به علت روش های جدید اندازه گیری فاصله ارائه می دهند.
این فاصله سنج های جدید همه از مثلث بندی و آرایش خطی CCD کوچکتری برای محاسبه ی فاصله و/یا حضور اشیا در میدان دید استفاده می کنند. ایده ی اساسی این است که: یک پالس از نور IR توسط امیتر منتشر می شود. این نور در میدان دید منتقل شده، یا با شئ برخورد می کند و یا به مسیر خود ادامه می
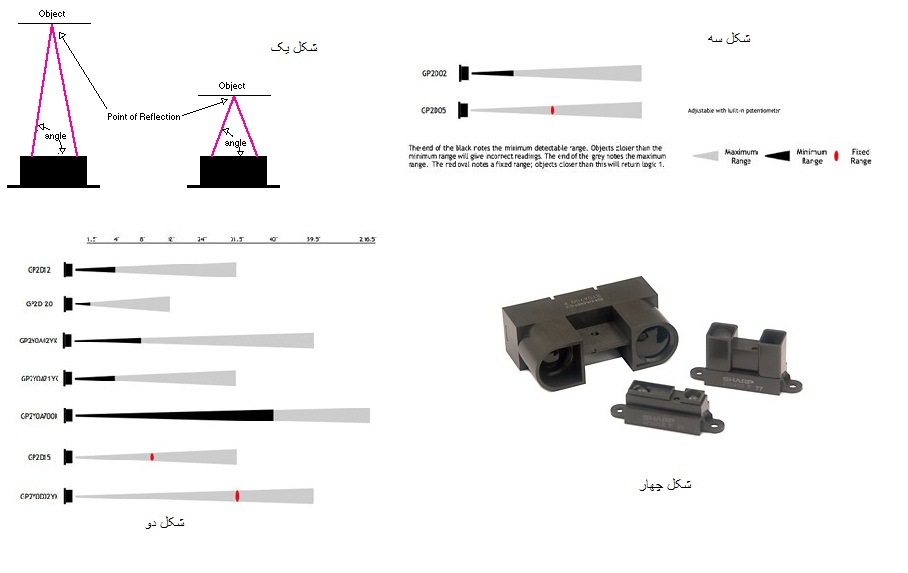
دهد. در صورت عدم وجود مانع (شئ) نور هرگز بازتابیده نمی شود و هیچ رنجی نشان داده نمی شود. در صورتی که نور از یک شئ بازتاب شود، به سنسور بازگشته و یک مثلث بین نقطه ی بازتاب، امیتر و سنسور ایجاد میکند. (شکل یک)
زاویهها در این مثلث بر مبنای فاصله از جسم تغییر میکند. بخش دریافت کنندهی این سنسورهای جدید در واقع یک لنز دقت است، که نور بازتاب شده را بر مبنای زاویهی مثلث مذکور به بخشهای مختلف آرایش خطی محصور CCD منتقل میکند. آرایش CCD میتواند مشخص کند که نور بازتاب شده با چه زاویهای
بازگشته و بنابراین میتواند زاویه تا جسم را محاسبه کند.
این روش جدید اندازهگیری فاصله تقریبا در مقابل دخالت نور محیطی ایزوله است و عدم تمایل شگفت انگیزی در مقابل رنگ جسم مورد شناسایی نشان میدهد. حال شناسایی یک دیوار کاملا سیاه در نور خورشید امکانپذیر است.
انتخاب سنسور
سنسورهای GP2XX مشتقات مختلفی دارند. جدول زیر در مشخص کردن هر نوع سنسور با رنج های ماکسیمم و مینیمم کمک می کند و نیز این که آیا سنسور مورد نظر یک مقدار فاصلهی متغییر و یا یک سیگنال شناسایی بولین (True/False) را تحویل می دهد: (شکل دو)
سنسورهای زیر قطع شده، و برای منابع تاریخی در نظر گرفته شده اند: (شکل های سه)
همانطور که میبینیم، هفت سنسور به چند ترتیب متفاوتند. سنسورهای GP2D12، GP2D120، GP2Y0A02 (‘0A02’)، GP2Y0A21 (‘0A21’) و GP2Y0A700 (‘0A700’) اطلاعات محدودهی حقیقی را به شکل یک خروجی
آنالوگ ارائه میدهند. مدلهای GP2D15 و GP2DY0D02 (‘0D’) به طور متفاوتی مقدار دیجیتالی واحدی را بر مبنای حضور جسم ارائه میدهد. هیچ کدام از سنسورها به سیگنال یا تایمر خارجی نیاز ندارند. در عوض به طور ممتد با جریان ممتد مورد نیاز حدودا 25mA شلیک
میکنند.
مدل 0A700 یک مورد ویژه است که خیلی بزرگتر از دیگر سنسورهای شارپ است. افزایش سایز به جهت تطبیق با لنزهای بزرگتر و مداربندی برای ماکسیمم رنج 5.5 متر است. (شکل چهار)
انتخاب سنسور مورد استفاده به موقعیت، ظرفیت کنترلر (اینکه آیا کانال A/D اضافی دارد یا خیر) و... بستگی دارد. مطالعهی جدول فوق میتواند در انتخاب گزینهی درست بسته به موقعیت کمک کند.