تعداد بازیکن ها و ابعاد ربات ها
به نام خدا
با عرض سلام خدمت دوستان عزیزم
در این جلسه به بررسی رقابت های ربوکاپ می پردازیم،این رقابت ها در یک دسته بندی کلی از بخش های مختلفی تشکیل شده:
• رقابتهای فوتبال
• رقابتهای امداد و نجات
• مسابقات نوجوانان (زیر ۱۸ سال)
• مسابقات روباتهای خانگی
در بخش رقابت های فوتبال 5 نوع لیگ مجزا وجود دارد
لیگ شبیه سازی(soccer simulation)
لیگ روباتهای سایز کوچک(small size)
لیگ روباتهای سایز متوسط(middle size)
لیگ روباتهای چهارپا (4 Legged robot)
لیگ روباتهای انسان نما
مشخصات زمین بازی:
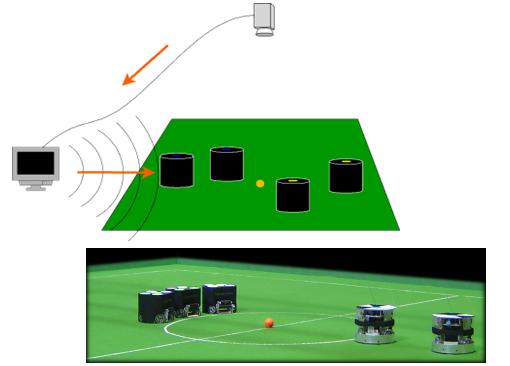
زمين بازي روباتهاي كوچك فوتباليست طبق قوانین 2010 نباید محوطهاي بیشتر از 05/6 طول و05/4 عرض داشته باشد كه كف آن از جنس موكت بدون پرز و به رنگ سبز ميباشد که کاملا صاف می باشد. خط كشيهاي زمين به رنگ سفيد و به پهناي 1 سانتي متر می باشد. محوطه بازی از يك دايره مركزي سفيد، خط وسط وخط ناحيه دفاعي، نقطه پنالتي و نقطه شوت آزاد تشکیل شده است. ديوارهاي دور زمين شيبدار بوده و داراي حداكثر ارتفاع 5 سانتي متر ميباشند. عرض دروازهها 50 سانتي متر است و يكي از آنها به رنگ زرد و ديگري به رنگ آبي ميباشد; در لیگ روبات های فوتبالیست سایز کوچک از یک توپ گلف نارنجی رنگ استفاده می شود.تصویر پایین نمایی از زمین و ربات های سایز کوچک را نشان می دهد.

تعداد بازیکن ها و ابعاد ربات ها
هر تيم از 4 روبات بازيكن و يك روبات دروازهبان (جمعاً 5 روبات) تشكيل ميشود و ابعاد روباتها ميبايد طوري باشد كه در يك استوانه به قطر 18 سانتي متر جاي بگيرند.

سیستم بینایی
ارتفاع روباتها، در تيمهائي كه از سيستم بينائي مركزي استفاده ميكنند، حداكثر 18 سانتي متر بوده و در غير اين صورت ميتواند تا 5/22 سانتي متر افزايش يابد. سیستم بینایی با به کارگیری نرم افزارهای خاص، که توانایی پردازش دادههای میکروپروسسوری را دارند، نوعی هوش مصنوعی برای ربات فراهم می سازد و به وسیله آن، قابلیت تصمیم گیری امکانپذیر می شود.
زمان مسابقه 20 دقيقه (دو نيمه 10 دقيقهاي) موثر است، بدين معنا كه در صورت ايجاد هر گونه وقفه در بازي، زمان نگه داشته ميشود، در طول اين مدت روباتها بدون دخالت انسان و تنها از طريق يك كامپيوتر هدايت شده و به فوتبال ميپردازند.

روبات ها در بازی فوتبال براساس قوانینی که توسط داور مسابقه (انسان)تعیین می شود به رقابت با یکدیگر می پردازند.
فوتبال سایز کوچک در برخی از روش ها با لیگ های دیگر متفاوت است. ربات هایی که توسط تیم ها ساخته می شوند باید نسبتا مقعر بدون هیچگونه سوراخی باشند.

چگونگی حرکت ربات ها
براي تشخيص و هدايت روباتها، معمولاً هر تيم يك دوربين را در ارتفاع 5 متري از مركز زمين نصب مينمايد و سپس اطلاعات دريافتي از اين سيستم بينائي مركزي را جهت هر گونه تجزيه و تحليل و تصميم گيري به يك كامپيوتر ارسال مينمايد. بطور كلي وظايف اصلي اين كامپيوتر عبارتند از : دريافت اطلاعات تصويري و تبديل آنها به اطلاعات ديجيتالي مناسب، پردازش اطلاعات دريافتي و تعيين محل روباتها و توپ از روي رنگ آنها، بررسي و تجزيه و تحليل بلادرنگ و محل و جهت حركت توپ و روباتها و نهايتاً اتخاذ تصميم در مورد چگونگي حركت روباتها در لحظه بعدي و صدور فرمان حركت به روباتها.
ربات ها با دید موضعی
در ربات هاي با ديد موضعي دوربين روي خود رباتها نصب مي شود و .پردازش تصوير نيز بوسيله ي بردهاي نصب شده بر روي ربات ويا از طريق كامپيوتري در خارج از زمين كه اطلاعات به آن منتقل شده انجام مي شود.كامپيوتري كه خارج از زمين قراردارد براي دادن راي داوري و در مواردي كه از دوربين سراسري استفاده مي شود براي بدست آوردن اطلاعاتي در رابطه موقعيت ربات ها استفاده مي شود . به طور كلي اين كامپيوتر اگر نگوييم كل، ولي بسياري از عمليات و پردازش ها را براي هماهنگي و كنترل ربات انجام ميدهد.ارتباط بين كامپيوتر و ربات ها از طريق وايرلس و به طور كلي با استفاده از گيرنده فرستنده ی بی سیم صورت مي گيرد.
هدف بلند مدت اين پروژه بوجود آوردن محيطي مناسب براي انجام و اجراي ايدههاي تحقيقاتي در زمينههاي روباتيك و هوش مصنوعي است. در اين راستا سعي بر اين است كه در ادامه كار، روباتها و سيستم هدايت آنها بهينه گردند تا شرایط برای پيادهسازي آن ايدهها، هر چه بيشتر فراهم آيد.
http://iml.cpe.ku.ac.th/skuba/archive/SkubaHighlights2008LQ.wmv
لینک زیر قسمتی از لیگ ربات های سایز کوچک در مسابقات جهاني روبوکاپ 2008 چين،در شهر "سوژو" می باشد.
ما در این جلسه به بحث در مورد لیگ ربات های فوتبالیست سایز کوچک (small size) می پردازیم.
