معرفی سنسور فاصله سنج نوری شارپ
خروجی غیرخطی
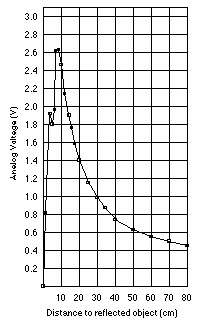
به علت برخی خواص پایهای مثلثاتی در مثلث حاصل از امیتر و نقطهی بازتاب و نیز دریافت کننده، خروجی این سنسورهای جدید به طور غیرخطی با توجه به فاصلهی اندازه گیری شده است. (شکل پنج)
گراف فوق خروجی معمول این سنسورها را نشان میدهد. ابتدا، خروجی سنسورها در محدودهی مشخص شده (10cm-80cm) خطی نیست بلکه به گونهای لگاریتمی است. این منحنی به مقدار کمی در هر سنسور با سنسور دیگر تفاوت خواهد داشت، بنابراین "نرمال" کردن خروجی با یک جدول جستجو و یا تابع پارامتری ایدهی خوبی خواهد بود. در این صورت، هر سنسور کالیبره شده و اطلاعات خطی بدست خواهد آمد که در هر سنسور ثابت است. یک مقاله برای توصیف چگونه خطی کردن اطلاعات با استفاده از محاسبات عددی در دسترس است؛ جهت یافتن این مقاله در داخل باکس کلمهی ‘linearize’ را تایپ کنید.
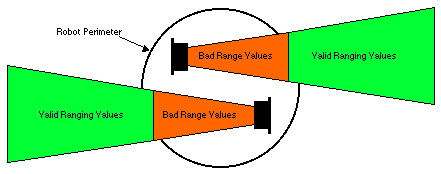
مورد دوم قابل توجه در گراف فوق این است که به محض اینکه در محدودهی مشخص شده قرار بگیرید (کمتر از10cm )، خروجی به سرعت کاهش یافته و شبیه به یک نمایش رنج بلندتر میشود. این موضوع در صورتی که روبات شما هنگامی که به جسم جامد نزدیک میشود سرعتش کند شود، در محدودهای کمتر از رنج مینیمم قرار گرفته و سپس در تفسیر نمایش رنج بلند دچار اشکال شده و با نهایت سرعت به سمت جسم حرکت کند می تواند فاجعه بار شود.
راحت ترین راه برای جلوگیری از وقوع این امر این است که سنسورها را در طول و یا عرض روبات در مقابل هم قرار دهیم. (شکل شش)
الگوی پرتو
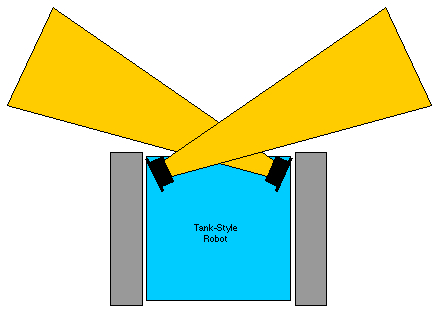
الگوی پرتوی این سنسورها در بین مدلها ثابت است. محدوده، معمولا در محدودهای بین 10-80cm بوده و پرتو تقریبا به شکل توپ فوتبال با بخش میانی پهن با عرض تقریبا 16 سانتیمتر است. این الگو یک الگوی پرتوی باریک است که اطلاعات رنجینگ زیادی را هنگامی که با یک سروو (Servo) جهت روبش سنسور هنگام برداشت اطلاعات کوپل می شود به دست میدهد.
هنگام استفادهی سنسورهای شارپ به عنوان بامپر در حالت جامد، عموما پهنترین الگوی ممکن برای فراهم کردن پوشش برای یک محدودهی بزرگ، مثل تمامی بخش جلویی روبات مطلوب است. این موضوع به راحتی میتواند توسط استفاده از دو سنسور که در مقابل یکدیگر در قسمت جلویی روبات قرار میگیرند صورت بگیرد. رایجترین سنسور برای استفاده در این آرایش GP2D15 است. (شکل نه)
بسته به نوع سنسور مورد استفاده، خروجی این دو سنسور میتواند باهم ترکیب شود تا به بودجهی میکروپروسسور I/Oشما کمک کند.
آرایش سنسورها
به جز GP2Y0A700 این سنسورها کاملا کوچک بوده و همگی از یک کانکتور کوچک با نام JST (Japan Solderless Terminal) استفاده می کنند. این کانکتورها دارای سه سیم هستند: زمین، vcc و خروجی. به علت اینکه سنسورها به طور ممتد شلیک میکنند و به هیچ زمان بندی برای شروع برداشت اطلاعات نیاز ندارند، کار با آنها آسانتر است، اما اغلب مصرف بالاتری دارند و به طور بالقوه هنگامی که چند سنسور در یک روبات مورد استفاده قرار میگیرند میتوانند مانع یکدیگر شوند. با در نظر داشتن تئوری عملیات سنسورها، همانطور که در بالا بحث شد، هنگام نصب آنها بر روی روبات از این مزاحمت میتوان جلوگیری کرد.
مدل GP2YA700 بزرگتر یک مورد ویژه است، و یک کانکتور JST با 5 پین و نیز دو سیم زمین و دو سیم متصل به منبع انرژی دارند. به هرحال این سیم ها میتوانند به هم لحیم شوند، و در نتیجه منبع انرژی متصل شده توانایی انتقال تقریبا 400mA مقدار جریان ماکسیمم را دارد (تقریبا 30-50mA جریان ممتد). مانند دیگر سنسور ها، GP2Y0A700 به طور ممتد شلیک میکند.
مدل های محدود شدهی GP2D02 و GP2D05 هردو از یک کانکتور JST دارای 4 سیم استفاده میکنند. سیم ها شامل زمین، vcc، ورودی تایمر و خروجی دیتا هستند. از آنجایی که منطق داخلی این سنسورها با ولتاژ حدودا 3 ولت فعالیت میکند، لازم است که از ورودی تایمر در مقابل رانده شدن به ولتاژ بالاتر از این مقدار حفاظت شود. این موضوع توسط یک شبکهی مقاومت برای تقسیم ولتاژ قابل انجام است، ولی روش مطلوب این است که از یک دیود سیگنال کوچک مثل دیود سوئیچی سرعت بالای 1N4148 استفاده شود. این دیود به این شکل وصل میشود تا به جریان اجازه دهد که با یک ورودی با درجه ی منطقی کم جاری شود. مدار داخلی این سنسورها در غیر این صورت ورودی را بالاتر میبرد. (شکل هفت)
تصمیم نهایی
این سنسورها یک ضمیمهی بزرگ به مجموعهی سنسورهای موجود برای روباتیک هستند؛ همینطور بسیار گرانقیمت بوده، مصرف خیلی کمی دارند، در محل های کوچک جای میگیرند و دارای یک رنج منحصر به فرد هستند که برای روبات های کوچک در محل های انسانی مثل راهرو ها، اتاق ها و موقعیتهای اتفاقی پرپیچ و خم مناسبند.
در عین این که این سنسورها دقت رنج بسیار بالایی را به دست میدهند، اطلاعات زیادی را برای روبات هایی که عموما با اطلاعات پر از نویز در ارتباط هستند ارائه میدهند. اغلب دانستن این که یک روبات به یک دیوار نزدیک است یا به حدکافی دور است، کافیست تا برای انتخاب حرکت بعدی تصمیم بگیرد.