آشنایی با قوانین روبوکاپ در مورد حمل توپ در لیگ ربات های فوتبالیست. معرفی و تشریح مکانیزمی برای حمل توپ در زمین مسابقه ( دریبلینگ ) .
به نام خدا
با عرض سلام خدمت دوستان عزيزم. مجدداً پوزش ميطلبم به خاطر نا هماهنگي و تاخير در ارايهي مطلب جديد.
اين جلسه هم مبحث رباتهاي فوتباليست را كه در دو جلسهي گذشته به آن پرداخته بوديم ادامه خواهيم داد و با مكانيزم بسيار مهمي در رباتهاي فوتباليست آشنا خواهيم شد كه براي حفظ توپ از آن استفاده ميشود.
اولين سوالي كه مطرح ميشود اين است كه در حالت كلي روبات چه نيازي به چنين سيستمي دارد؟
همانطور كه ميدانيد، يكي از مهمترين قابليتهاي يك بازيكن فوتبال، توانايي او در حفظ توپ يا به اصطلاح پا به توپ بودن اوست. اين موضوع در رقابت رباتها هم به همين اندازه اهميت دارد و رباتي كه توانايي بيشتري در حفظ توپ داشته باشد، صاحب موقعيتهاي بيشتري در زمين خواهد شد و در نتيجه مي تواند بهتر بازي كند.
اما چگونه مي توان براي ربات چنين سيستمي طراحي كرد؟
براي پاسخ به اين سوال ابتدا بايد به قوانين اين ليگ مراجعه كرد تا از محدوديتهايي كه براي استفاده از چنين سيستمهايي وضع شده است مطلع شويم. بند زير ترجمهايست از قانوني كه فدراسيون جهاني روبوكاپ براي حركت توپ در مسابقات اين ليگ وضع كرده است.
حركت توپ:
1- يك ربات نميتواند توپ را نگه دارد.
تذكر: نگه داشتن توپ به اين معناست كه رباتي كنترل كامل توپ را از طريق حذف تمام درجات آزادي توپ در دست گيرد. مثلاً متصل كردن توپ به بدنه روبات، احاطه كردن توپ توسط بدنهي ربات و مانع شدن از دسترسي رباتهاي ديگر، چرخاندن و يا به دام انداختن توپ توسط هر كدام از اجزاي بدنهي روبات. زمانيكه ربات در حركت است، در صورتيكه چرخش توپ متوقف شود و يا در جلوي ربات نچرخد، ميتواند نشان دهندهي اين باشد كه توپ به دام افتاده است.
2- توپ نميتواند زير بدنهي ربات نگه داشته شود.
3- در تمامي زمانها توپ بايد قابل ديدن باشد.
4- رباتهاي ديگر بايد به توپ دسترسي داشته باشند.
5- تنها استثنا براي نگه داشتن توپ، استفاده از استوانهاي چرخشي است كه به توپ چرخش به عقب ميدهد تا توپ را روي سطح خود نگه دارد. |
همانطور كه مي بينيد براي طراحي چنين سيستمي قوانين بسيار سخت گيرانهاي وضع شده است تا از اختلالهاي احتمالي در تقابل سيستمهاي مختلف با يكديگر جلوگيري شود؛ و در حقيقت فقط يك شيوه براي حفظ توپ قابل طراحي و استفاده است كه در ادامه تشريح مكانيزم آن خواهيم پرداخت.
مبناي فعاليت اين مكانيزم اين است كه با اعمال نيرويي به توپ، آن را در جهتي به دوران در مياورد كه باعث ميشود توپ به سمت خود ربات هدايت شود. به شكل زير نگاه كنيد:
اين شكل، تصويري شماتيك از مكانيزم سيستم حفظ توپ يك تيم حرفهاي است كه اين مكانيزم را ابتدا در نرم افزارهاي حرفهاي طراحي جامدات طراحي كامپيوتري كردهاند. اگر اين استوانه در راستايي كه در شكل نشان داده شده است بچرخد، توپي كه با آن در تماس است به سمت خود استوانه متمايل مي شود و در نتيجه همواره با نيروي مناسبي متمايل به سمت خود ربات است. در اين سيستم توپ همواره در حال دوران است و در مواقعي كه ربات ثابت است، توپ بر روي زمين سر ميخورد تا بتواند دوران داشته باشد.
رباتي كه در تصوير ميبينيد به اين سيستم مجهز شده است:
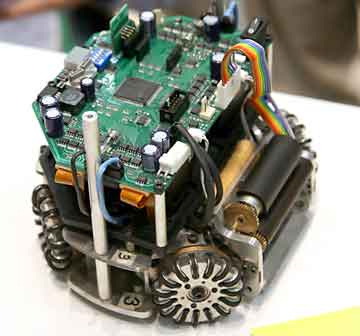 |
همانطور كه گفته شد، اين سيسنم تنها سيستم مجاز براي حفظ توپ در زمين مسابقه است. براي طراحي چنين سيستمي، نياز به يك موتور مجزا با سرعت چرخش زياد (rpm بالا) داريم كه بتواند با سرعت بالايي توپ را بر روي زمين بچرخاند.
ربات به وسيلهي اين سيستم نسبتاً ساده، مي تواند توپ را به هر نقطه از زمين مسابقه جابجا كند و اگر اين مكانيزم دقيق طراحي شود ميتواند توپ را حتي در هنگامي كه ربات با سرعت زياد به سمت عقب حركت ميكند هم حفظ كند. كاربرد اين مكانيزم فقط محدود به رباتهاي دانشاموزي نيست و تقريباً در تمام سطوحِ رباتهاي فوتباليست اين سيستم مورد استفاده قرار ميگيرد. در زير تصوير ربات يكي از مطرحترين تيمهاي حاضر در ليگ رباتهاي فوتباليست دانشجويي سايز كوچك است كه با همين سيستم حفظ توپ ميكند.
 |
در جلسهي آينده با مكانيزم ديگري آشنا خواهيم شد كه به ربات قابليت شوت زدن را ميدهد و مبناي كار آن آهنرباهاي الكتريكي است. همچنين با مدارات الكترونيكي و سيستمهاي كنترل قدرت در آن آشنا خواهيم شد.
در انتها از تمامي دوستاني كه نظرات خودشون را با ما در ميان گذاشتهاند صميمانه تشكر و قدر داني ميكنم و اگر هنوز به سوالات و نظراتشان پاسخ داده نشده است پوزش فراوان ميطلبم، انشاالله به زودي نظرات به نمايش در خواهند آمد.
تا جلسهي آينده خدانگهدار
دوست شما، فراز اميرغياثوند |