از زمانی که ارسطو در قرن چهارم قبل از میلاد به حرکت مارمولک در وضعیت های مختلف اشاره کرد تا کنون بشر بدنبال آن است که چگونگی حرکت مارمولک برخلاف جاذبه زمین را دریابد.
اگر چه علاوه بر مارمولک ها جانوران دیگری مانند حشرات هم قابلیت راه رفتن بر سطوح مختلف را دارند، اما ویژگی اندازه ی جثه وحرکت سریع این جانور و مواردی از این دست کنجکاوی دانشمندان را درباره ی این موجودات بر انگیخته است...
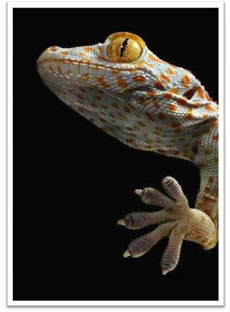 | Gecko از خانوادهی Gekkonidae ، یکی از 2000 گونهي شناخته شده مارمولکها در دنیاست که به دلیل توانایی در اتصال به سطوح صاف، حركت سريع و بالا رفتن از سطوح عمودی مورد توجه دانشمندان قرار گرفته است.
اندازهی این جانور از حدود 5 سانتيمتر تا 30 سانتیمتر گزارش شده است و زیستگاه آن مناطق گرم حاره است. در هر پنجهی این جانور 5 انگشت وجود دارد که در تماس با دست سطحی صاف و خشک دارد و فاقد غدد ترشح کنندهي مواد چسبنده است.
|
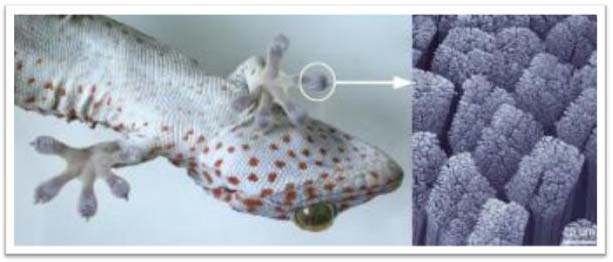
چسبندگی (چسبندگی خشک dry adhesion) قابل توجه پنجهها در حقیقت مدیون رشتههای بسیار ریزی است که در سطح زیرین پنجهها وجود دارد. این رشتهها (setae) خود متشکل از حدود دو هزار میلیون تار (spatula) در هرسانتیمتر مربع است که هر یک تنها 100 نانومتر ضخامت دارد. این رشتهها میزان تماس جانور با سطح را افزایش میدهند. ساختار این تارها از مادهی کراتینی آبگریزی تشکیل شده است که از طریق نیروهای ضعیف واندروالس (Van der Waals force) با سطح مورد نظر انفعال داخلی انجام میدهد. این پیوندهای کم انرژی واندروالس از نوع لاندون یا پراکندگی است که توسط مولکولهای دوقطبی زودگذر ایجاد میشود (مولکولها بهطور لحظهای دارای بارهای مثبت و منفی میشوند و تشکیل دو قطبیهای موقت میدهند.) و هر دو جسم همسایه را به طرف یکدیگر میکشند.
برای اطلاع بیشتر از این نیروها به دانشنامهي رشد مراجعه کنید.
منبع ديگري نيز به زبان انگليسي هست كه ميتوانيد استفاده كنيد
 |
در بررسیهای انجام شده محققان دریافتند که قدرت چسبندگی نیروهای واندروالس به طور کلی به فرم راس این رشتهها بستگی دارد نه به ماهیت شیمیایی سطحی که مارمولک بر روی آن راه میرود.
درسال 2006 ، مارك كاتكسكي (Mark Cutkosky) از دانشگاه استنفورد (Stanford University) تلاش خود برای حل این معما را با ساخت روباتی آغاز کرد. او روبات خود را -که از مارمولک الهام گرفته شده است- stickybot (روبات چسبنده) نامگذاری کرده است.
برای ساختن پنجهها در این روبات ، كاتكسكي و دانشجوی دکتراي او سانگباي كيم (Sangbae Kim) از ماده ی "urethane"، رشتههای نازکی با راس حدود 30 میکرومتر ساختند. اگرچه این رشتهها به انعطاف و چسبندگی رشتههای موجود در انگشتان مارمولک نیست اما روبات 500 گرمی را در روی سطح عمودی نگه میدارد.
چسبندگی تنها یکی از چیزهایی بود که كاتكسكي در مارمولک پیدا کرد. برای حرکت سریع و گریز مارمولک در سطوح عمودی -به طوری که 1 متر در دقیقه را بپیماید- پاها باید بدون تقلا و به سادگی، بیدرنگ از قید چسبندگی آزاد شود. برای اینکه بفهمند چگونه مارمولک این کار را انجام میدهد، كاتكسكي از دو متخصص زیستشناس به نام های باب فول (Bob Full) و كلر آتمن (Kellar Autumn) کمک گرفت. بعد از بررسیهای آناتومیکی، تستهای نیرو و آنالیز دویدن مارمولک بر روی تردمیل بهصورت عمودی ، فول و آتمن به این نتیجه رسیدند که چسبندگی مارمولک وابسته به جهت است. پنجهها زمانی که بدن به پایین کشیده میشود میچسبند و زمانی که جهت کشیدگی عوض میشود (از قید چسبندگی) رها میشوند.
با توجه به این اصل، كاتكسكي روبات خود را به پنجههای 7 قسمتی مجهز کرد که همانند پنجههای مارمولک میچسبند و رها میشوند و با وضعیت قدمهایی شبیه مارمولک (قدمهای بلند و گشاد) -که به راحتی آن را روی دیوار قرار میدهد- روبات خود را برای مراحل بعدی آزمایش آماده کرد. به وسیلهی ترکیبی از اجزای فلزی، پلیمر و پارچه، قسمتهای سخت تا انعطافپذیر روبات طراحی شد تا به حرکت روانتر آن کمک کند. كاتكسكي در مقالهای دربارهي آناتومی مارمولک به این نکته برخورد کرد که این جانور از طریق تاندونها وزن بدن را به طور مساوی بر روی تمام سطح پاها تقسیم ميکند. برای این منظور او از قطعهای پارچه پلیاستر استفاده کرد. در حال حاضر Stickybot روی سطحهاي عمودی شیشه، پلاستیک و سرامیک حرکت میکند اما با سرعت 4 سانتیمتر در دقیقه یعنی کسری از سرعت مارمولک در طبیعت. به علاوه بخش چسبنده در پنجهی stickybot همانند مارمولک قابلیت پاک شدن ندارد و به راحتی گرد و غبار به آن میچسبد.
سازمانی که هزینههای این پروژه را تامین میکند؛ موسسه تحقیقاتی وزارت دفاع ایالات متحده (DARPA)، این روبات را برای دیدهبانی و تجسس در نظر گرفته است اما این روبات هنوز در مراحل اولیه طراحی است و کاربردهای زیادی را در آینده نزدیک برای آن در نظر دارند. پروژهی دیگری که این سازمان در نظر دارد، پروژهی Z-man، این امکان را به سربازان خواهد داد تا بدون استفاده از طناب یا نردبان از سطوح عمودی صاف بالا روند.
هم اکنون دانشمندان درصددند با استفاده از نانوتیوبهای کربن ساختارهای رشتهای مشابه با setea در مارمولک، اما با قدرت چسبندگی چندین برابر آن را شبیهسازی کنند که بتواند وزن انسان را تحمل کند.
پس به اونهایی که به فیلمهای مرد عنكبوتي (Spiderman) علاقه دارند مژده میدیم که به زودی میتونند مثل مرد عنکبوتی از برج میلاد بالا برن!!! | |
منابع:
1. Evidence for van der Waals adhesion in gecko setae.pdf